Three-Bar Truss Design Optimization¶
Problem Overview¶
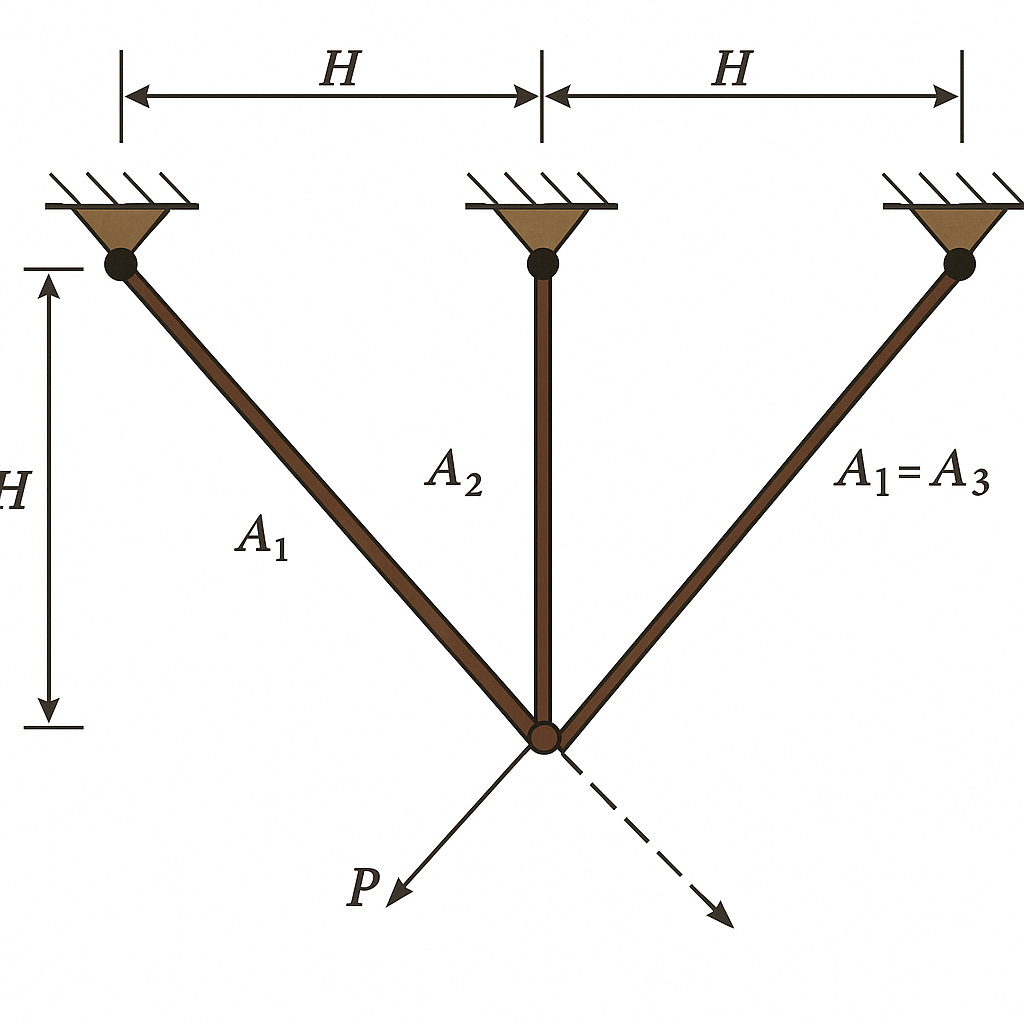
The three-bar truss design is an engineering optimization problem with the objective to evaluate the optimal cross-sectional areas of bars in a truss structure such that the volume is minimized while satisfying stress constraints.
This problem is a classic benchmark in structural optimization and represents a simple yet practical application of optimization in civil engineering and structural design.
Objective¶
Minimize the volume of the truss structure:
Where:
- \(x_1\) = cross-sectional area of members 1 and 3 (due to symmetry)
- \(x_2\) = cross-sectional area of member 2
- \(H\) = height/length parameter (typically \(H = 100\) cm)
Design Variables¶
| Variable | Description | Range | Unit |
|---|---|---|---|
| \(x_1\) | Cross-sectional area of members 1 and 3 | [0, 1] | cm² |
| \(x_2\) | Cross-sectional area of member 2 | [0, 1] | cm² |
Constraints¶
Stress constraint for member 1:
\(g_1 = \frac{\sqrt{2}x_1 + x_2}{\sqrt{2}x_1^2 + 2x_1x_2}P - \sigma \leq 0\)
Stress constraint for member 2:
\(g_2 = \frac{x_2}{\sqrt{2}x_1^2 + 2x_1x_2}P - \sigma \leq 0\)
Stress constraint for member 3:
\(g_3 = \frac{1}{x_1 + \sqrt{2}x_2}P - \sigma \leq 0\)
Problem Constants¶
- Height/length parameter: \(H = 100\) cm
- Applied load: \(P = 2\) KN/cm²
- Allowable stress: \(\sigma = 2\) KN/cm²
- Members 1 and 3 have the same cross-sectional area due to symmetry
- All members are subject to stress constraints
Optimal Solution¶
The reported optimal solution is:
- \(x_1 = 0.788675\) cm²
- \(x_2 = 0.409841\) cm²
- Objective value = \(263.8958\) cm³ (minimum volume)
Implementation with PyEGRO¶
# =======================
# STEP 1: Define Objective function
# =======================
import numpy as np
from PyEGRO.optimize.GA import run_deterministic_optimization, save_optimization_results
def three_bar_truss_volume(X):
"""
Calculate the volume of the three-bar truss structure in a vectorized way.
Args:
X: Array of design points where X[:, 0] is x₁ and X[:, 1] is x₂
Returns:
Array of volumes for each design point
"""
# Ensure X is at least 2D
X = np.atleast_2d(X)
# Height/length parameter (cm)
H = 100
# Extract x1 and x2 as vectors
x1, x2 = X[:, 0], X[:, 1]
# Volume formula: (2√2·x₁ + x₂)·H
volume = (2 * np.sqrt(2) * x1 + x2) * H
return volume
# =======================
# STEP 2: Define constraint functions
# =======================
# Problem constants
H = 100 # Height/length parameter (cm)
P = 2 # Applied load (KN/cm²)
sigma = 2 # Allowable stress (KN/cm²)
def constraint_stress1(X):
"""
Stress constraint for member 1: g₁ = (√2x₁+x₂)/(√2x₁²+2x₁x₂)·P - σ ≤ 0
Args:
X: Array of design points where X[:, 0] is x₁ and X[:, 1] is x₂
Returns:
Array of constraint values (≤ 0 means the constraint is satisfied)
"""
# Ensure X is at least 2D
X = np.atleast_2d(X)
# Extract x1 and x2 as vectors
x1, x2 = X[:, 0], X[:, 1]
# Calculate constraint
numerator = np.sqrt(2) * x1 + x2
denominator = np.sqrt(2) * x1**2 + 2 * x1 * x2
# Handle potential division by zero
safe_denominator = np.maximum(denominator, 1e-10)
g1 = (numerator / safe_denominator) * P - sigma
# Replace any invalid values with a large positive number
g1 = np.where(denominator > 1e-10, g1, 1e6)
return g1
def constraint_stress2(X):
"""
Stress constraint for member 2: g₂ = x₂/(√2x₁²+2x₁x₂)·P - σ ≤ 0
Args:
X: Array of design points where X[:, 0] is x₁ and X[:, 1] is x₂
Returns:
Array of constraint values (≤ 0 means the constraint is satisfied)
"""
# Ensure X is at least 2D
X = np.atleast_2d(X)
# Extract x1 and x2 as vectors
x1, x2 = X[:, 0], X[:, 1]
# Calculate constraint
numerator = x2
denominator = np.sqrt(2) * x1**2 + 2 * x1 * x2
# Handle potential division by zero
safe_denominator = np.maximum(denominator, 1e-10)
g2 = (numerator / safe_denominator) * P - sigma
# Replace any invalid values with a large positive number
g2 = np.where(denominator > 1e-10, g2, 1e6)
return g2
def constraint_stress3(X):
"""
Stress constraint for member 3: g₃ = 1/(x₁+√2x₂)·P - σ ≤ 0
Args:
X: Array of design points where X[:, 0] is x₁ and X[:, 1] is x₂
Returns:
Array of constraint values (≤ 0 means the constraint is satisfied)
"""
# Ensure X is at least 2D
X = np.atleast_2d(X)
# Extract x1 and x2 as vectors
x1, x2 = X[:, 0], X[:, 1]
# Calculate constraint
denominator = x1 + np.sqrt(2) * x2
# Handle potential division by zero
safe_denominator = np.maximum(denominator, 1e-10)
g3 = (1 / safe_denominator) * P - sigma
# Replace any invalid values with a large positive number
g3 = np.where(denominator > 1e-10, g3, 1e6)
return g3
# =======================
# STEP 3: Define the problem information
# =======================
data_info = {
'variables': [
{
'name': 'x1',
'vars_type': 'design_vars',
'range_bounds': [0.0, 1.0],
'description': 'Cross-sectional area of members 1 and 3'
},
{
'name': 'x2',
'vars_type': 'design_vars',
'range_bounds': [0.0, 1.0],
'description': 'Cross-sectional area of member 2'
}
]
}
# =======================
# STEP 4: Define the list of constraint functions
# =======================
constraint_functions = [
constraint_stress1,
constraint_stress2,
constraint_stress3
]
# =======================
# STEP 5: Run optimization with explicit constraints
# =======================
results = run_deterministic_optimization(
data_info=data_info,
true_func=three_bar_truss_volume,
constraint_funcs=constraint_functions,
pop_size=200,
n_gen=100,
sampling_method='lhs',
crossover_prob=0.9,
crossover_eta=15,
mutation_eta=20
)
# =======================
# STEP 6: Save results and display solution
# =======================
save_optimization_results(
results=results,
data_info=data_info,
save_dir='THREE_BAR_TRUSS_RESULTS'
)
# Print the solution
print("\nOptimized Solution:")
print(f" x1 (area of members 1 and 3): {results['best_solution'][0]:.6f} cm²")
print(f" x2 (area of member 2): {results['best_solution'][1]:.6f} cm²")
print(f"Objective Value (volume): {results['best_fitness']:.6f} cm³")
print(f"Feasible: {results['is_feasible']}")
References¶
- Rao, S.S. (2019). Engineering Optimization: Theory and Practice. 5th Edition, John Wiley & Sons.
- Koziel, S., & Leifsson, L. (2013). Surrogate-based modeling and optimization. New York: Springer.